
In fascinating science news, scientists from the University of Tokyo, have succeeded in growing living human skin on a robot finger and the video is as creepy as it is amazing to watch.

Scientists Create Robot Finger With Human Skin That Heals Itself
By
Annie N. in
Science and Technology
On 9th June 2022
advertisement
The world may be overrun by sentient robots yet.
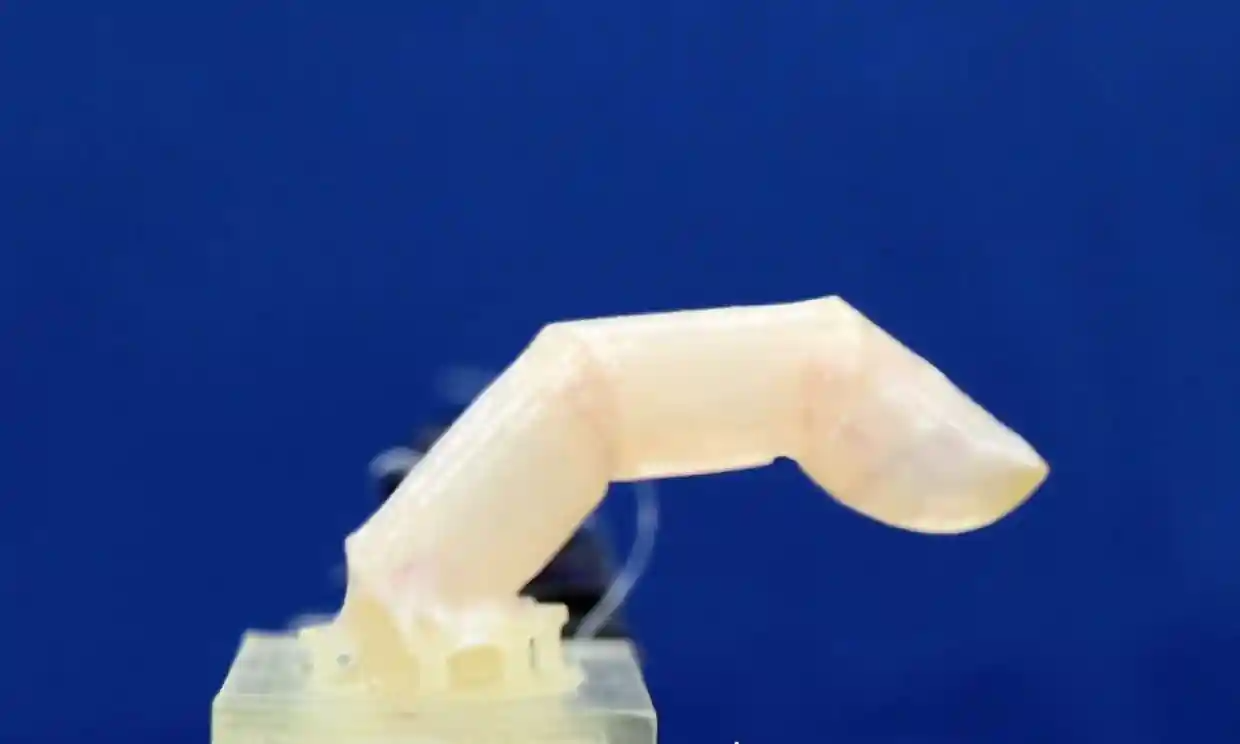
Scientists from the University of Tokyo developed a robot finger and managed to grow living human skin tissue to encase it. The goal is to create robots that can look like humans, but we think the goal might be to quicken the impending apocalypse.
Biohybrid engineer Shoji Takeuchi says that robots that look similar to humans may be able to interact more seamlessly in certain environments such as for providing medical care or working in the service industry.
advertisement
To make this modern miracle possible, Takeuchi and his fellow scientists submerged the robotic finger in human skin cells and collagen. The dermal fibroblasts, as they’re scientifically known settled to create a layer of skin or dermis and covered the robotic limb.

Kawai et. al.
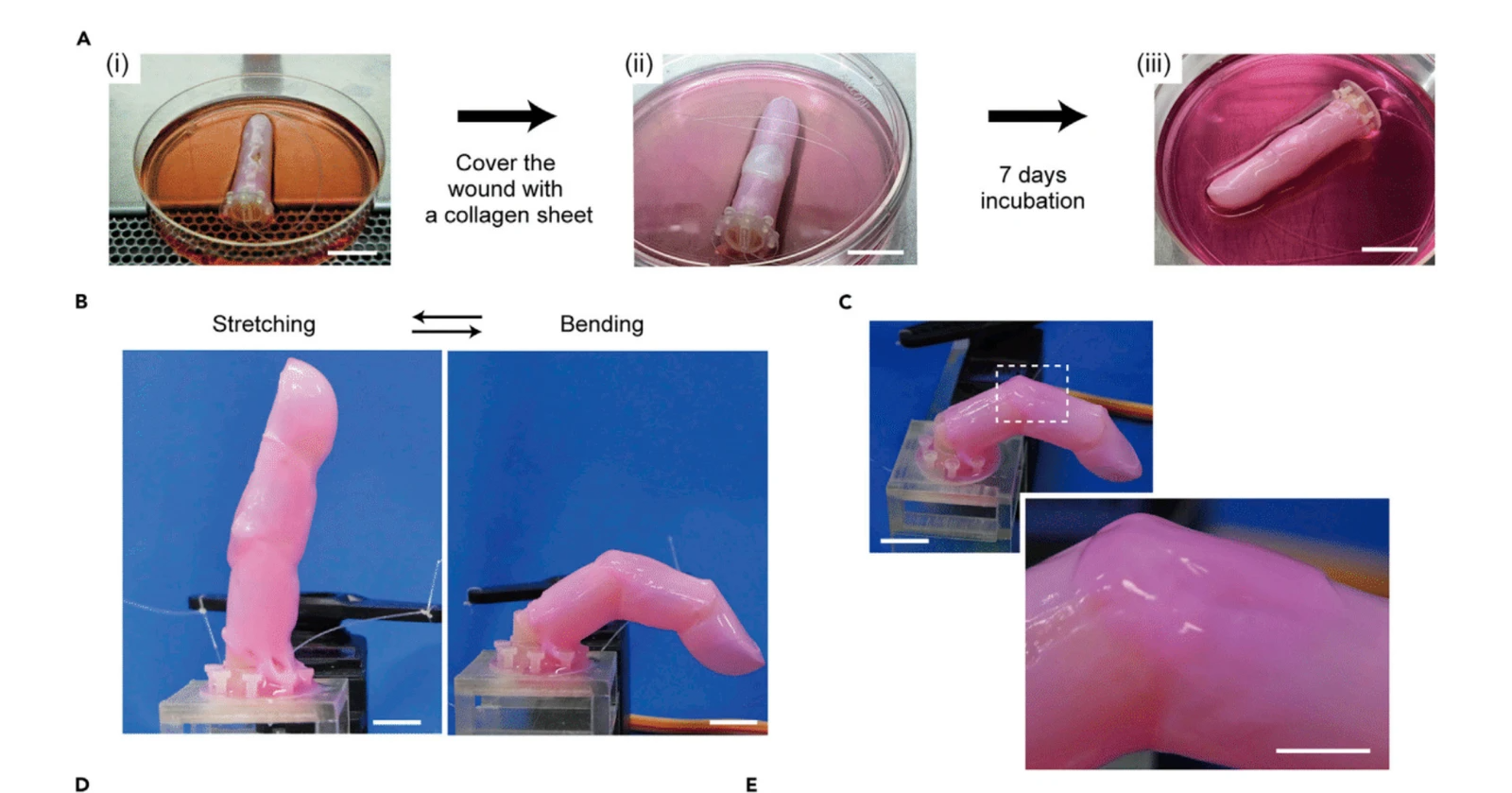
The epidermis or outer layer of the skin was then created by pouring a liquid form of keratinocyte cells. The two layers bonded over a couple of weeks to create a layer of skin that measured a few millimeters.

Kawai et. al.
advertisement
The skin was strong enough to withstand bending and also had the ability to heal itself. You’re welcome for the nightmares.
Kawai et. al.
advertisement
This discovery was made after the scientists made a small incision on the skin and later covered it with a collagen bandage. The skin cells then merged with the bandage naturally and sealed the broken skin within a week.
Kawai et. al.
advertisement
Ritu Raman, an MIT scientist said,
“This is very interesting work and an important step forward in the field. Biological materials are appealing because they can dynamically sense and adapt to their environments.”

Kawai et. al.
advertisement
While the future does seem to be a complete human-looking robot, we’re still a ways away as the robot finger needs to spend most of its time submerged in sugar and amino acids to keep it functioning.

Kawai et. al.